Robotics Researches

Communication mechanisms for cooperative human-robot manipulation tasks in unstructured environments
People: Camilo Perez Quintero; Martin Jagersand
Humans teach each other manipulation tasks through gestures and pointing. We develop an HRI where the robot interprets spatial gestures using comuter vision and carries out manipulation tasks...

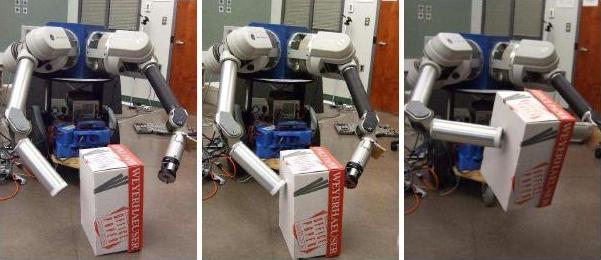
A modular and flexible bimanipulation system for space-analogue
People: Alejandro Hernandez-Herdocia; Azad Shademan; Martin Jagersand
An advanced dual-arm mobile manipulator is prototyped for research in semi-autonomous teleoperation and supervisory control...
Uncalibrated Visual Servoing
People: Azad Shademan; Amir-massoud Farahmand; Martin Jagersand
Vision-based motion control of a WAM arm without using camera calibration or knowledge of camera/robot transformation for use in unstructured environments...

Predictive display
People: Martin Jagersand; Adam Rachmielowski; Dana Cobzas; Azad Shademan; Neil Birkbeck
A predictive display system provided immediate visual feedback from robot site at the operator site...
Image-based maps for robot localization
People: Dana Cobzas; Hong Zhang; Martin Jagersand
Panoramic image mosaic augmented with depth information applied to robot localization...

Visual Task Specification
People: Mona Gridseth
A visual interface where the user can specify tasks for the robot to complete using visual servoing...
Mobile Manipulation and Telerobotics for Space Exploration
People: Azad Shademan; Alejandro Hernandez-Herdocia; David Lovi; Neil Birkbeckartin; Jagersand
We have a partnership with the Canadian Space Agency (CSA) to develop semi-autonomous supervised control in space telerobotics using uncalibrated vision for traking and modeling...

Point to Line Visual Servoing
People: Mona Gridseth
Uncalibrated visual servoing is used to align the end-effector with the marked line on a patient...