Computer Vision Researches

Modular Tracking Framework (MTF), A Highly Efficient and Extensible Library for Registration based Visual Tracking
People: Abhineet Singh; Mennatullah Siam; Vincent Zhang; Martin Jagersand
MTF is a modular, extensible and highly efficient open source framework for registration based tracking targeted at robotics applications. It is implemented entirely in C++ and is designed from the ground up to easily integrate with systems that support any of several major vision and robotics libraries including OpenCV, ROS, ViSP and Eigen.
Tracking video benchmark database
People: Martin Jagersand
Tracking human manipulation tasks is challenging. This benchmark contains 100 videos of ordinary human manipulation tasks (pouring cereal, drinking coffee, moving and reading rigid books and flexible letters etc). The videos are categorized w.r.t. task difficulty, speed of motion and light conditions...
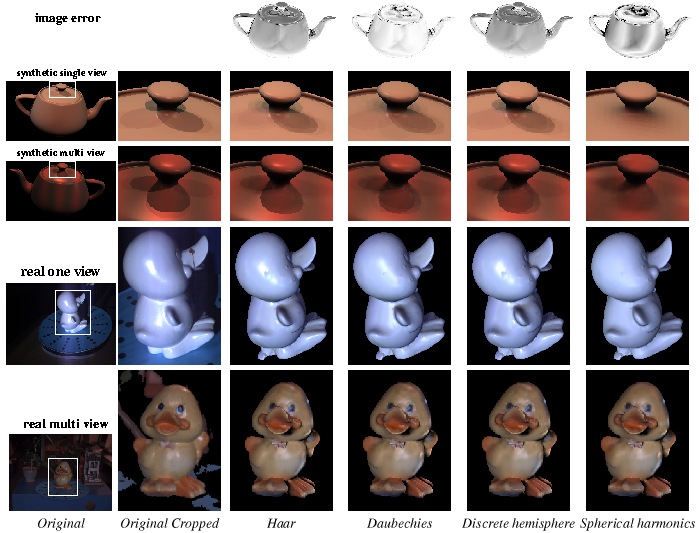
Wavelet light basis
People: Cameron Upright; Dana Cobzas; Martin Jagersand
A wavelet based light representation used for representing and capturing light...
Range intensity registration
People: Dana Cobzas; Hong Zhang; Martin Jagersand
A novel image-based algorithm for registering camera intesity data with range data from a laser rangefinder...

Modeling with dynamic texture
People: Martin Jagersand; Dana Cobzas; Keith Yerex; Neil Birkbeck
Inaccuracies in a coarse geometry obtained using structure-from-motion is compensated by an image-based correction - dynamic texture..
Variational Shape and Reflectance Estimation
People: Neil Birkbeck; Dana Cobzas; Peter Sturm; Martin Jagersand
Variational method implemented as a PDE-driven surface evolution interleaved with reflectance estimation...

3D SSD Tracking
People: Martin Jagersand; Dana Cobzas; Peter Sturm
3D SSD tracking A 3D consistent model is imposed to all tracked SSD regions, thus supporting direct tracking of camera position...
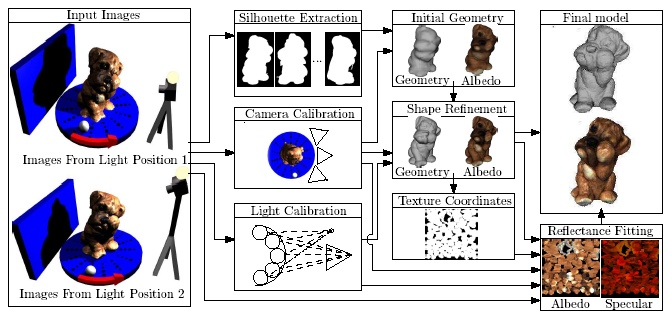
An image-based capture system
People: Keith Yerex; Neil Birkbeck; Cleo Espiritu; Cam Upright; Adam Rachmielowski; Dana Cobzas; Martin Jagersand
A quick and easy to use image-based modeling system for the acquisition of both 3D geometry and visual appearance of real world objects...

On-line tracking and modeling
People: Adam Rachmielowski; Neil Birkbeck; Martin Jagersand; Dana Cobzas
On-line 3D reconstruction from tracked feature points...