Tracking Manipulation Tasks (TMT)
Dataset
This dataset contains 100 videos of daily tasks that humans do. The purpose is to have a standard dataset that covers a wide range of challenges that a tracker would face, if used in a manipulation setup.We record videos using both a human user and a robot arm. The videos are of oriented motion videos (object motion parallel to the image plane, motion around object axis and rotation around object axis) All videos are recorded at 30 fps and are tagged with the corresponding challenge(s) that it presents. All videos have publicly available ground truth files. Following "downloads" you can choose from downloading .jpg files and a tracking data file of the corresponding speed and light condition you need.
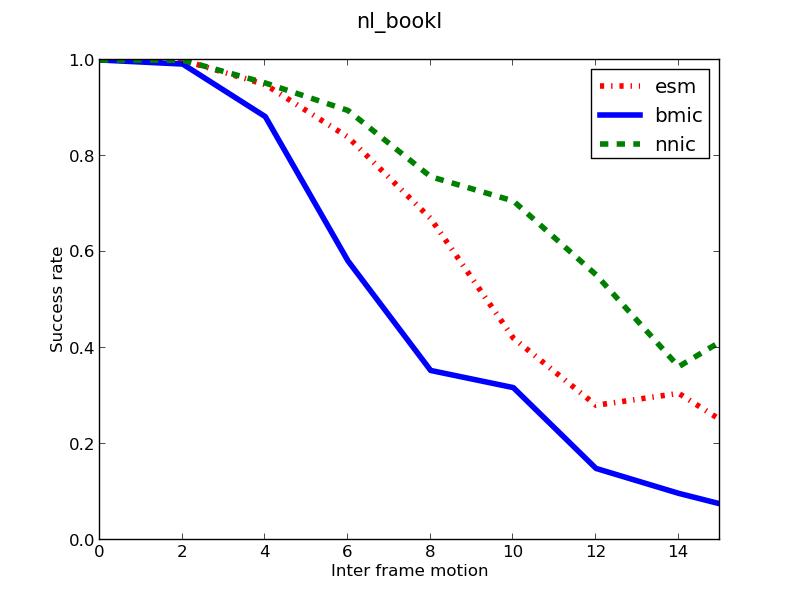
We evaluate some of the trackers existing in literature. These trackers are IVT [David Ross et. al], TLD [Kalal et. al], L1 [Mei et. al], ESM [Malis et. al], IC [Baker et. al] and NNIC [Travis et. al]. We thoughtflly chose 3 state of the art online learned trackers and 3 regsitration based trackers and subsequently analyse the results. The wide range of motion that this dataset presents brings out the usability of a tracker for manipulation. Evaluation scripts and codes of the trackers are also provided.
Test Sequences and Ground Truth
|
Oriented Motion Tasks
|

|
Composite Motion Tasks
|
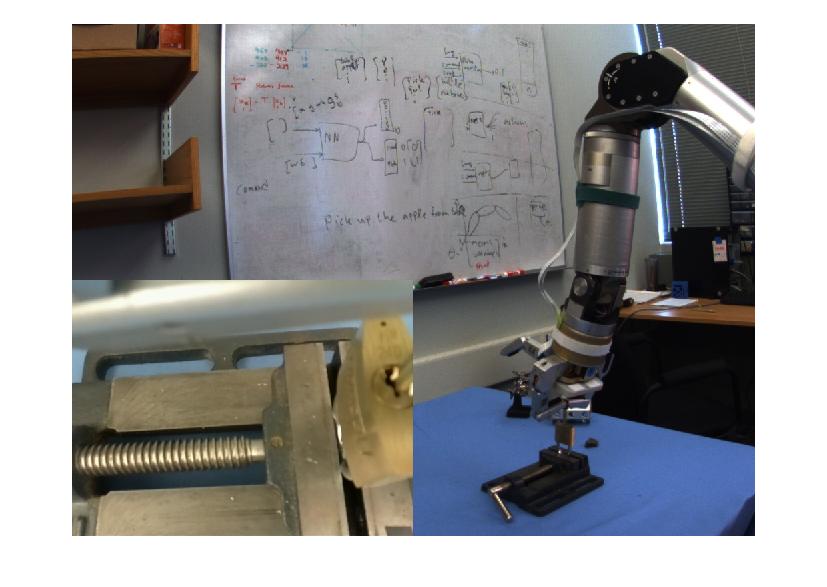
Robot Recorded Oriented Motion Tasks
|
|
|
Fine Manipulation Tasks
|
 |
Codes and Usage Information
|
|
Evaluation Results
|
If you are using this dataset or the associated codes please cite the following,
@inproceedings{trackerManipulation,
title={Tracking Benchmark and Evaluation for Manipulation Tasks},
author={Roy, Ankush and Zhang, Xi and Wolleb, Nina and Perez, Quenterio, Camilo and Jagersand, Martin},
booktitle={International Conference on Robotics and Automation},
publisher={IEEE},
year={2015}
}
CONTACT: Martin Jagersand