On-line 3D modeling and tracking |
| Adam Rachmielowski, Neil Birkbeck, Martin Jagersand Dana Cobzas, |
ReferencesRachmielowski, A., Birkbeck, N., Jagersand, M., Cobzas, D., Realtime visualization of monocular data for 3D reconstruction, Canadian Conference on Computer and Robot Vision (CRV) 2008 Rachmielowski, A., Cobzas, D., Jagersand, M. Robust SSD tracking with incremental 3D structure estimation, Canadian Conference on Computer and Robot Vision (CRV) 2006 |
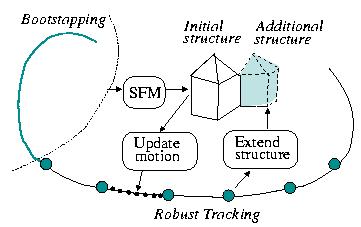
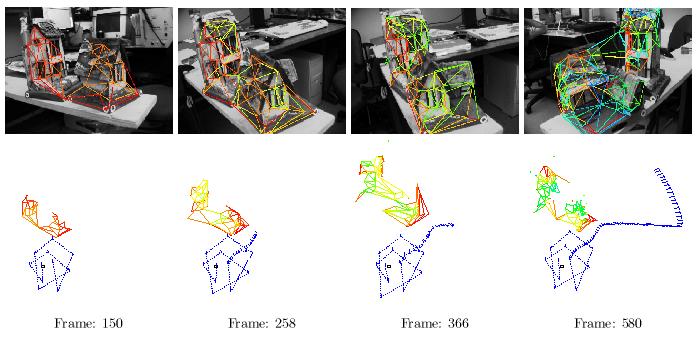
DescriptionSSD tracking with incremental 3D structure estimation Monocular SLAM with realtime modeling and visualization While the geometric aspects of structure and motion estimation from uncalibrated images are well understood, and it has great promise in applications, it has not seen widespread use. This is mainly due to the fact that SFM methods rely on good input image data, but the lack of user feedback during image acquisition often lead to incomplete or poorly sampled reconstruction results. We propose an on-line modeling system that integrates modeling and tracking and provides immediate model visualization. Visualization of the model during image acquisition allows the operator to interactively verify that an adequate set of input images has been collected for the modeling task. SSD tracking with incremental 3D structure estimation An early system combines SSD tracking with incremental structure computation. We show how in combination the structure estimation and tracking benefit each other, resulting in both better structure and more robust tracking. Particularly, through the 3D structure, our method can manage visibility constraints, add new image patches to track as they come into view and remove ones that are occluded or fail. This allows tracking over larger pose variations than possible with conventional SSD tracking (e.g. going around an object or scene where new parts come into view.)
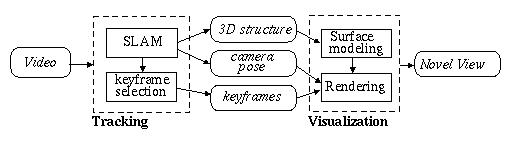
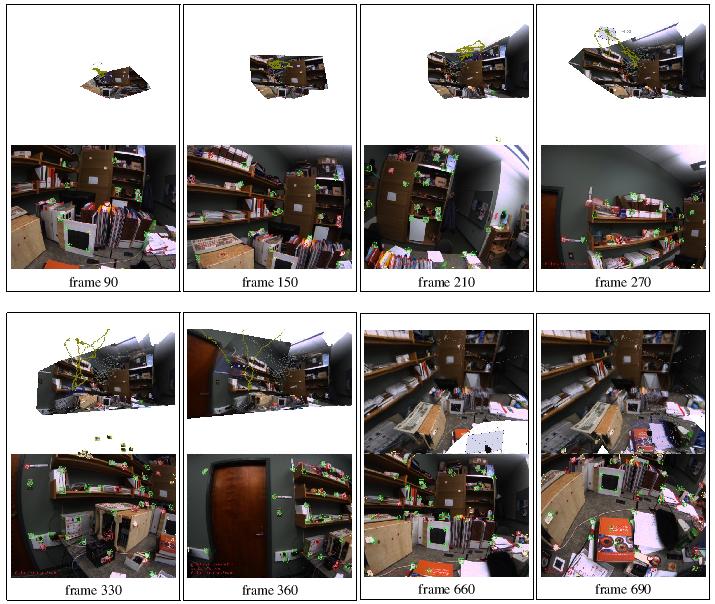
Monocular SLAM with realtime modeling and visualization Recently we proposed a video-based system that constructs and visualizes a coarse graphics model in real-time and automatically saves a set of images appropriate for later off-line dense reconstruction. Our implementation uses real-time monocular SLAM to compute and continuously keep extending a 3D model, augments this with key-frame selection for storage, surface modeling, and on-line rendering of the current structure textured from a selection of key-frames. This rendering gives an immediate and intuitive view of both the geometry and if suitable viewpoints of texture images have already been captured.
|