Introduction
 Building a mobile manipulator can be expensive in terms of:
Building a mobile manipulator can be expensive in terms of:
- Money
- Time
- Knowledge
- Engineering Resources
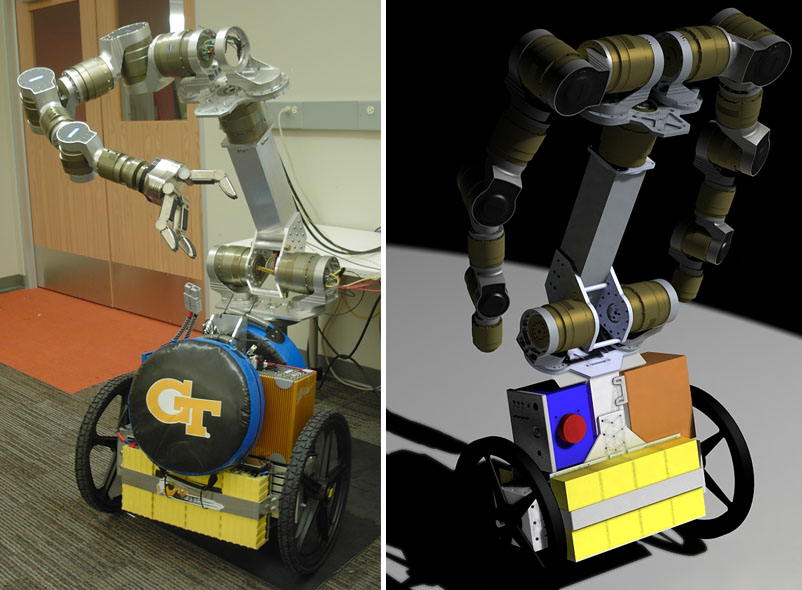
Thus they are only accessible to a few. Is it possible to reach a broader audience? We built a two-arm mobile manipulator from Off-The-Shelf solutions for:
- Mobile Base
- Arms
- Computation
- Sensors
- Power
We got a platform that allows us to focus in Algorithms and Distributed Software.