System Integration
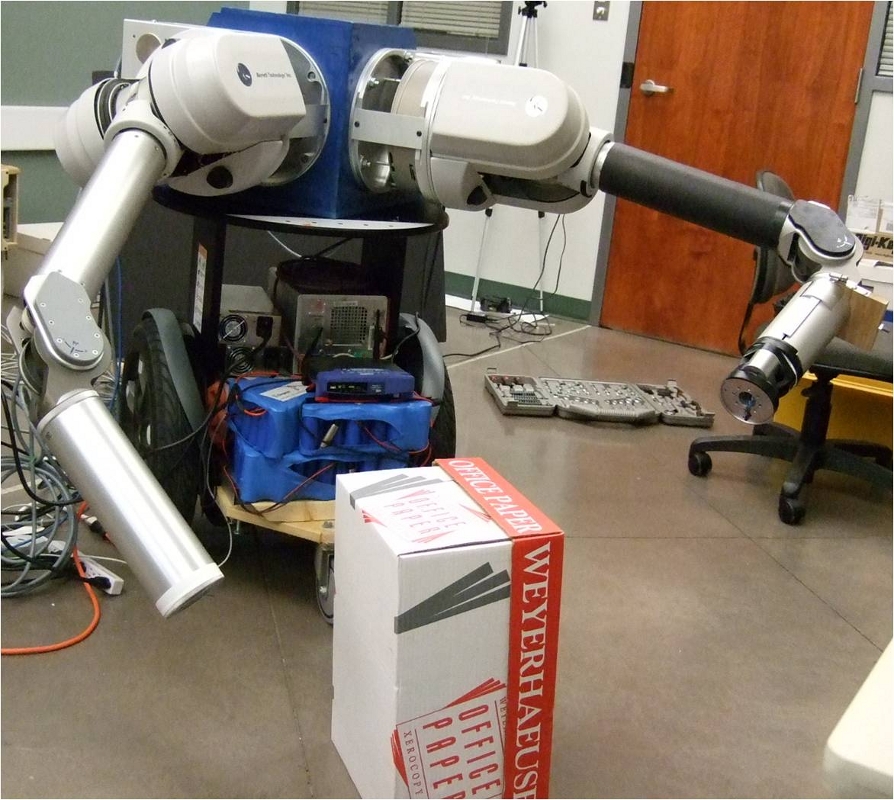
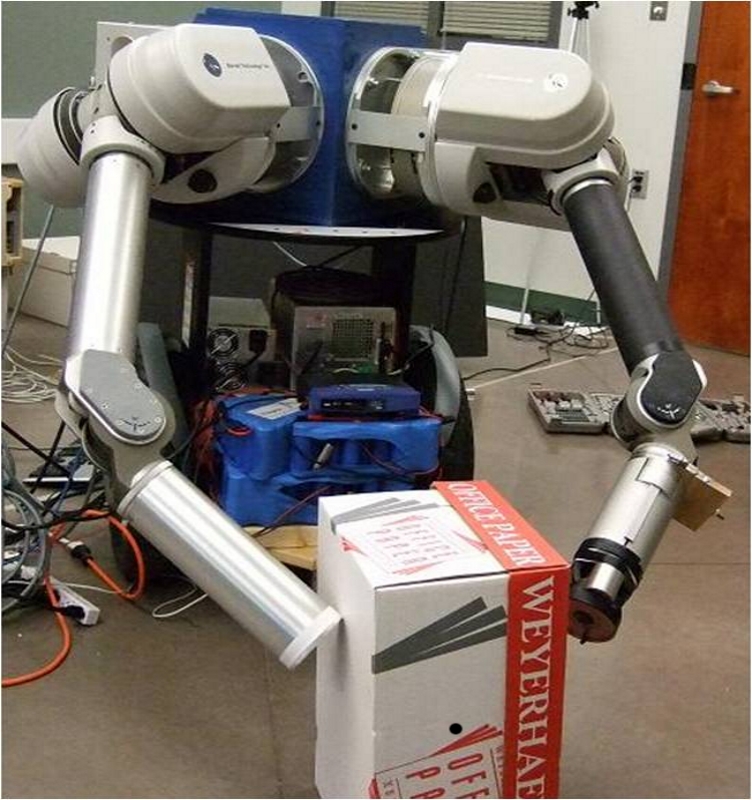
All major computation is done on-board in the Workstations. Visualization and Task Specification are done on the user side. Commands are sent over wireless to the robot. At the moment each arm is controlled by it's own computer, but this will be changed in the near future to a single computer to control both, which will make synchronization between both arms easier.