 |
Zichen ZhangPh.D. Candidate at University of AlbertaEmail: vincent.zhang at ualberta.ca Resume • Google Scholar • Github • Linkedin • Blog 
|
About Me
- I'm a Ph.D Candidate in CS with a specialization in Statistical Machine Learning, at the University of Alberta, supervised by Dr. Martin Jagersand and Dr. Dale Schuurmans.
- My research aims to develop novel methods and algorithms for solving complex problems that require learning from data and interacting with the environment.
Selected Projects and Publications
* denotes equal contribution

|
Managing Temporal Resolution in Continuous Value Estimation: A Fundamental Trade-off.
[pdf]
Zichen Zhang*, Francesco Zanini*, Junxi Zhang*, Alex Ayoub*, Johannes Kirschner*, Masood Dehghan*, Dale Schuurmans* NeurIPS 2023
|

|
A Simple Decentralized Cross-Entropy Method
[pdf]
[code]
Zichen Zhang, Jun Jin, Martin Jagersand, Jun Luo*, Dale Schuurmans* NeurIPS 2022 Generalized the Cross-Entropy Method to increase sample efficiency in continuous-action planning |

|
Learning State Conditioned Linear Mappings for Low-Dimensional Control of Robotic Manipulators
[IEEE link]
Michael Przystupa*, Kerrick Johnstonbaugh*, Zichen Zhang, Laura Petrich, Masood Dehghan, Faezeh Haghverd, Martin Jagersand IROS 2023 |

|
Reducing Selection Bias in Counterfactual Reasoning for Individual Treatment Effects Estimation [pdf]
Zichen Zhang, Qingfeng Lan, Lei Ding, Yue Wang, Negar Hassanpour, Russell Greiner. Poster Spotlight @ NeurIPS 2019 CausalML Workshop. |
|
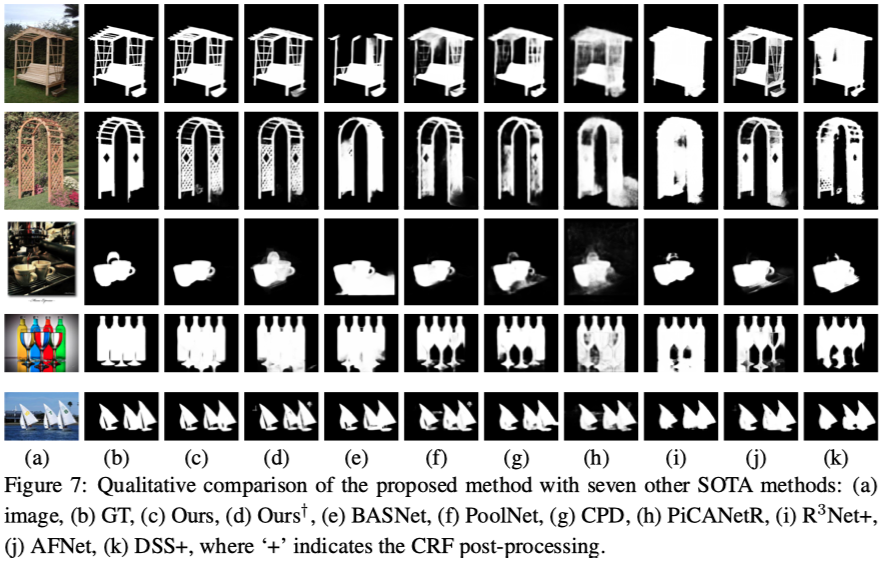
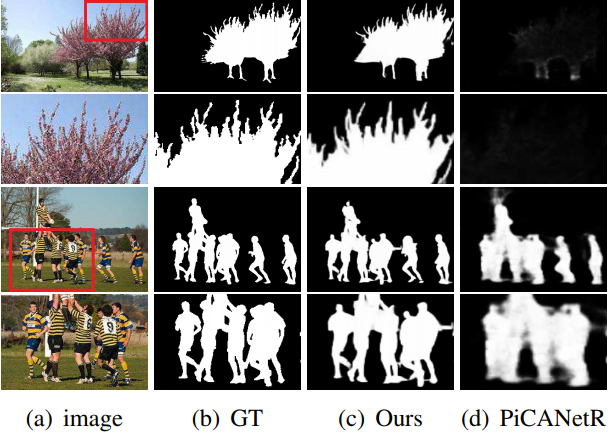
U^2-Net: Going Deeper with Nested U-Structure for Salient Object Detection [pdf][code]
Xuebin Qin, Zichen Zhang, Chenyang Huang, Masood Dehghan, Osmar R. Zaiane, Martin Jagersand Pattern Recognition 2020. |
|
BASNet: Boundary-Aware Salient Object Detection [pdf][supp][code]
Xuebin Qin, Zichen Zhang, Chenyang Huang, Chao Gao, Masood Dehghan, Martin Jagersand CVPR 2019. |
|
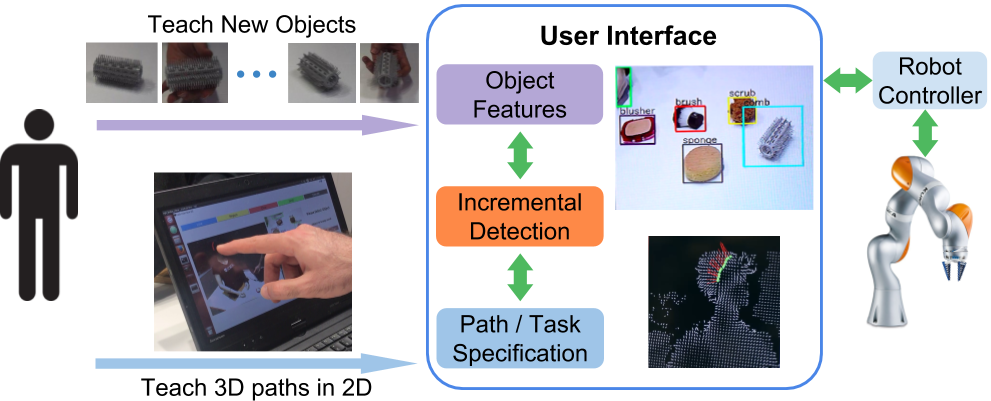
Online Tool and Task learning via Human Robot Interaction [pdf]
Masood Dehghan∗, Zichen Zhang∗, Mennatullah Siam∗, Jun Jin, Laura Petrich and Martin Jagersand ICRA 2019. Among top five finalists in KUKA Innovation Award 2018 world final in Hannover, Germany |
|
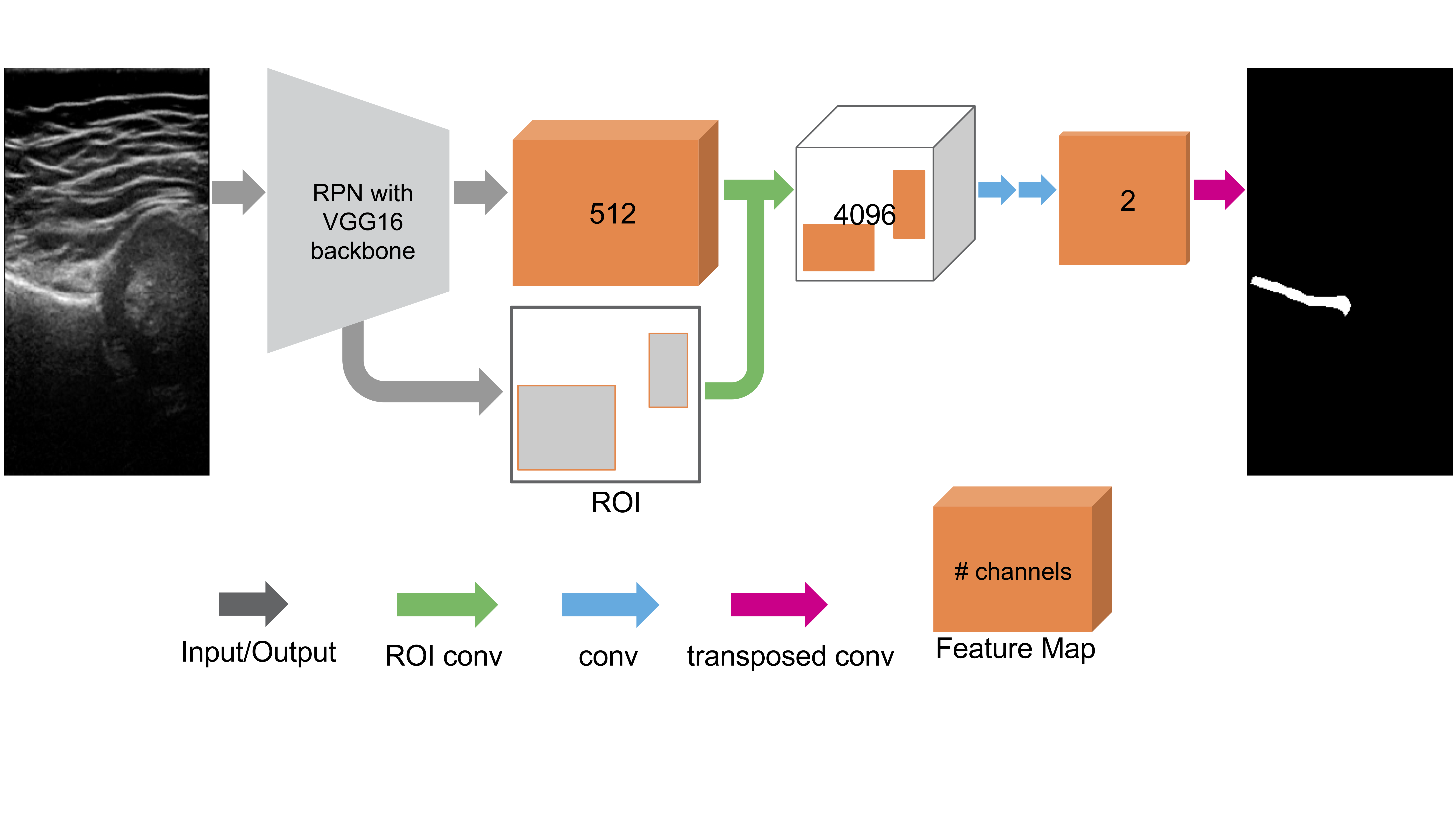
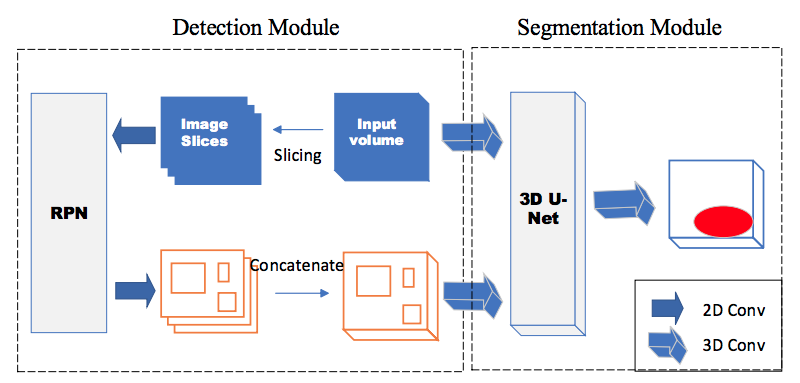
End-to-end detection-segmentation network with ROI convolution [pdf][code]
Zichen Zhang, Min Tang, Dana Cobzas, Dornoosh Zonoobi, Martin Jagersand, Jacob L. Jaremko ISBI 2018 |
|
Segmentation-by-Detection: A Cascade Network for Volumetric Medical Image Segmentation [pdf]
Min Tang, Zichen Zhang, Dana Cobzas, Martin Jagersand, Jacob L. Jaremko ISBI 2018 |
|
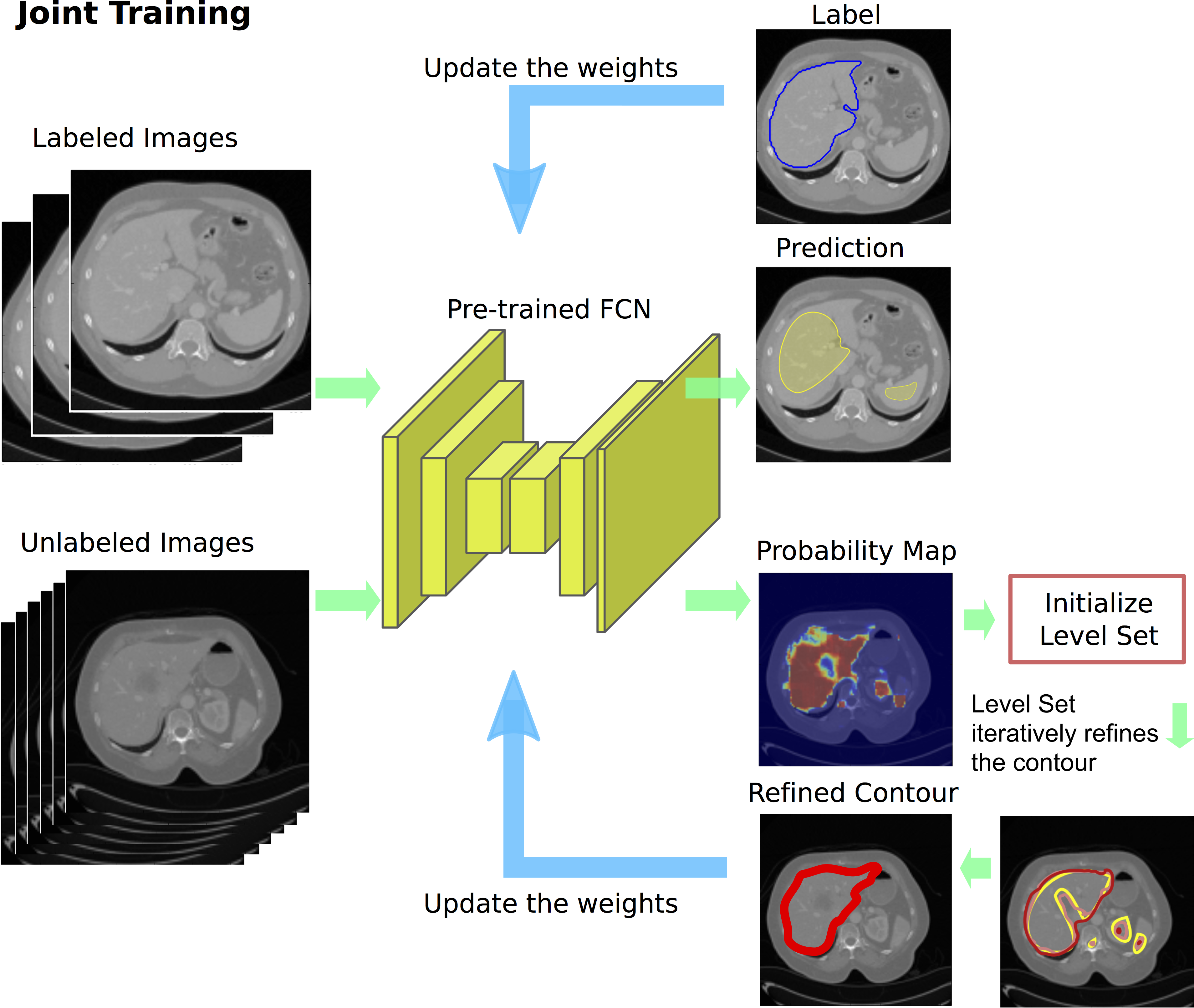
A Deep Level Set Method for Image
Segmentation [pdf]
Min Tang, Sepehr Valipour, Zichen Zhang, Dana Cobzas, Martin Jagersand MICCAI workshop 2017 |
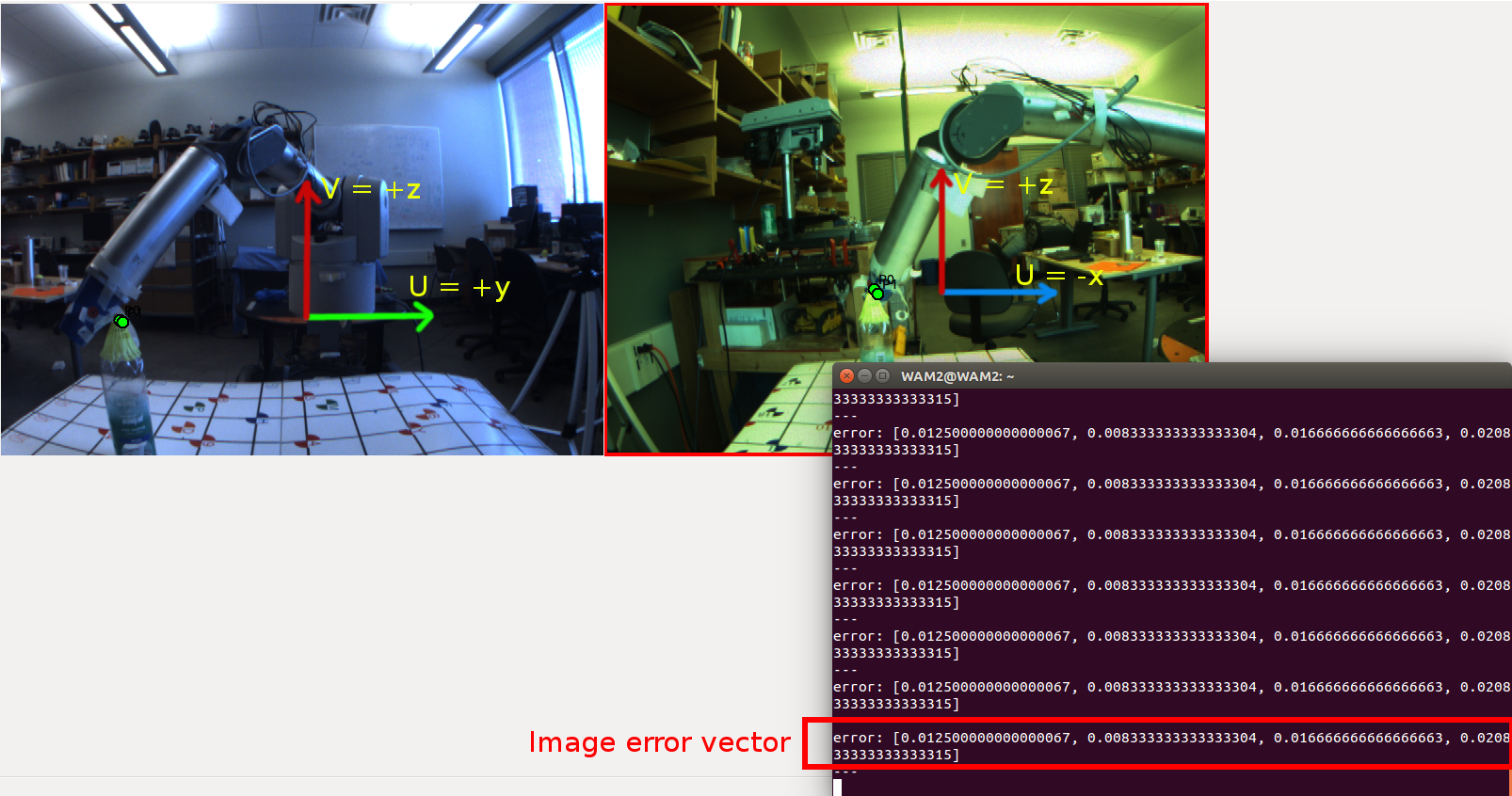 |
Uncalibrated Visual Servoing
Uncalibrated visual servoing using a 4-DOF robotic arm: Barrett WAM. The target is specified on the images which is then directly used for inverse kinematics. |
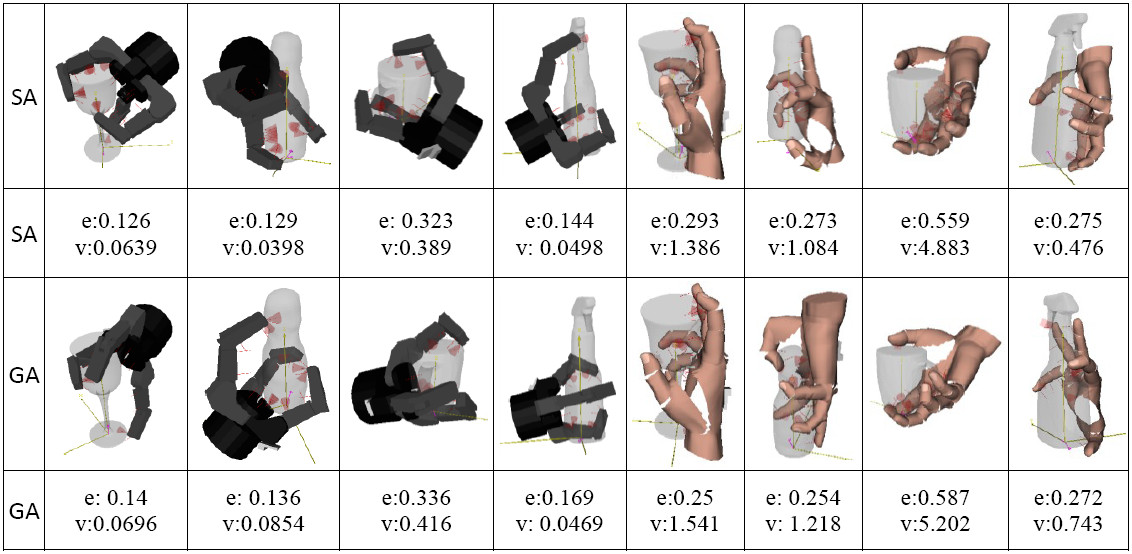 |
Grasp Planning of 3D Objects Using Genetic Algorithm [pdf]
Zichen Zhang , Jason Gu, Jun Luo Industrial Electronics (ISIE), 2013 |
Service
- Reviewer for ICML 2023, 2024
- Reviewer for ICLR 2024
- Reviewer for NeurIPS 2022-2024
- Reviewer for CoRL 2021, 2022, 2024
- Reviewer for IJCAI 2021, 2022
- Reviewer for ICRA 2016-2018
- Reviewer for IROS 2020-2022
- Reviewer for Transaction on Image Processing (TIP) 2020
- Group Leader at NeurIPS 2022 Education Outreach
- Volunteer at IROS 2017
Honors & Awards
- NeurIPS 2023 Top Reviewer
- Alberta Graduate Excellence Scholarship 2023
- NeurIPS Scholar Award 2022, 2023
- NeurIPS 2019 Travel Award
- Science Graduate Scholarship, 2018, Faculty of Science, University of Alberta
- Alexander Graham Bell Canada Graduate Scholarship-Doctoral (NSERC CGS-D), 2018-2022
- Alberta Innovates - Graduate Student Scholarship (AITF - PhD), 2018-2022
- President's Doctoral Prize of Distinction, 2018-2020, University of Alberta
- Science Graduate Scholarship, 2016, Faculty of Science, University of Alberta
- NSERC Canada Graduate Scholarships–Master’s Program (NSERC CGS-M), 2016-2017
- Alberta Innovates Technology Futures Scholarship (AITF - Master), 2016-2017
- Walter H Johns Graduate Fellowship, 2016, University of Alberta