





Pathfinding is a key task in robotics and games. Pathfinding systems need to be flexible and fast. They are often used to assist in a variety of tasks, including terrain analysis. Most efficient pathfinding systems are based on some type of abstraction mechanism.
Pathfinding for Commercial Games
Commercial games generally have tight memory and processing budgets, and so solutions for this space require careful management of these resources. In parts of 2006-07 I worked with BioWare to implement a pathfinding engine for their upcoming game Dragon Age. This system included a system that incremently computes paths during travel, avoiding delays in movement. The people at BioWare have done a great job extending this engine, and I'm looking forward to seeing the final game. This is a prototype shot of the abstraction from a test level in the game.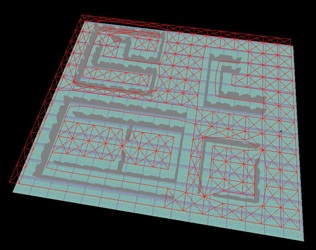
Cooperative Pathfinding
I have been working on explicit and implicit cooperation during pathfinding with my master's student Renee Jansen, as well as with Michael Buro. Renee has done some nice work on getting units to pathfind together without paying the expense of fully-cooperative algorithms. (Movies will be posted here soon.)Abstraction in Pathfinding and Search
I have collaborated with several other researchers in better understanding the role that abstraction plays in pathfinding and search. This has included a theoretical analysis of abstraction mechanisms, of the suboptimality that can be induced when using abstraction, as well as practical algorithms which use abstraction to great effect.HOG
HOG is a research testbed which includes components for running pathfinding simulations, as well as many different abstraction techniques. HOG is freely available and has been used by a wide variety of researchers. HOG is not currently being updated, as a more general search framework is being developed which will support a larger set of domains and techniques.Pathfinding-Related Publications
- Memory Efficient Pathfinding Abstractions (Book Chapter), AI Wisdom 4
- A New Approach To Cooperative Pathfinding, Renee Jansen and Nathan Sturtevant, AAMAS-2008 (Short paper)
- Coarse-to-Fine Search Techniques, Ken Anderson, Nathan Sturtevant, Robert Holte, and Jonathan Schaeffer, Technical Report TR 08-05, Unviersity of Alberta, April 2008.
- Graph Abstraction in Real-time Heuristic Search, Vadim Bulitko, Nathan Sturtevant, Jieshan Lu, Timothy Yau, Journal of Artificial Intelligence Research (JAIR)
- An Analysis of Map-Based Abstraction and Refinement, Nathan Sturtevant and Renee Jansen, SARA-2007, Whistler, BC.
- Memory-Efficient Abstractions for Pathfinding, Nathan Sturtevant, AIIDE-2007, Stanford, CA
- Improving Collaborative Pathfinding Using Map Abstraction, Nathan Sturtevant and Michael Buro, AIIDE-06, Marina del Rey, CA.
- State Abstraction for Real-time Moving Target Pursuit: A Pilot Study. Vadim Bulitko and Nathan Sturtevant, AAAI Workshop on Learning For Search, 2006.
- Partial Pathfinding Using Map Abstraction and Refinement, Nathan Sturtevant and Michael Buro, Proceedings AAAI-2005, July, 2005.
- Speeding Up the Convergence of Learning Real-time Search via Abstraction, Vadim Bulitko, Nathan Sturtevant, and Maryia Kazakevich, Proceedings AAAI-2005, July, 2005.