COMPUTER VISION PROJECTS
|
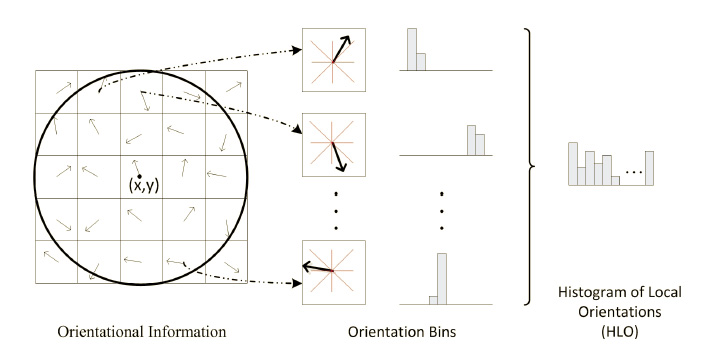
Rotation Invariant Local Frequency Descriptors for Texture Classification This goal of this project is to develop a novel rotation invariant method for texture claqssification based on local frequency components. The local frequency components are computed by applying 1D Fourier transform on a neighboring function defined on a circle of radius R at each pixel. Three sets of descriptor are extracted from the low frequency components, two based on the phase and one based on the magnitude. The proposed descriptors are rotation invariant and very robust to noise. The combination of these three sets are used for texture classification. The experimental results show that the proposed Reference R. Maani, S. Kalra, and Y.H. Yang, "Rotation Invariant Local Frequency Descriptors for Texture Classification," IEEE Trans. on Image Processing, Vol. 22, No. 6, 2013, pp. 2409-2419.
|
|
|
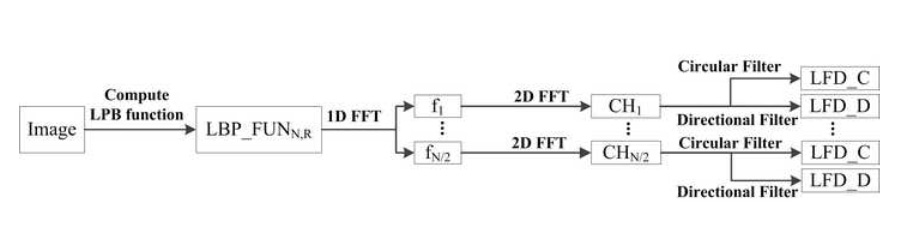
Noise Robust Rotation Invariant Features for Texture Classification This project presents a novel, simple, yet powerful and robust method for rotation invariant texture classification. Like the Local Binary Patterns (LBP), the proposed method considers at each pixel a neighboring function defined on a circle of radius R. We define local frequency components as the magnitude of the coefficients of the 1D Fourier transform of the neighboring function. By applying different bandpass filters on the 2D Fourier transform of the local frequency components, we define our Local Frequency Descriptors (LFD). The LFD features are added dynamically from low frequencies to high. The features defined in this paper are invariant to rotation. As well, they are robust to noise. The experimental results on the Outex, CUReT, and KTH-TIPS datasets show that the proposed method outperforms state-of-the-art texture analysis methods. The results also show that the proposed method is very robust to noise. Reference R. Maani, S. Kalra, and Y.H. Yang, "Noise Robust Rotation Invariant Features for Texture Classification," Pattern Recognition, Vol. 46, Issue 8, 2013, pp. 2103-2116. (http://dx.doi.org/10.1016/j.patcog.2013.01.014).
|
|
A symmetric neighborhood structures. |
Similarity Measure and Learning with Gray Level Aura Matrices (GLAM) for Texture Image Retrieval In this project, we develop a new similarity measure for texture images based on the gray level aura matrices (GLAM), originally proposed by Elfadel and Picard for modeling textures. With the new similarity measure, a support vector machine (SVM) is used to learn pattern similarities for texture image retrieval. In our approach, a texture image is first segmented into clusters of gray Reference X. Qin and Y.H. Yang, "Similarity measure and learning with gray level Aura matrices (GLAM) for texture image retrieval," Proc. IEEE CVPR, 2004, pp. 326-333. (http://dx.doi.org/10.1109/CVPR.2004.1315050)
|
|