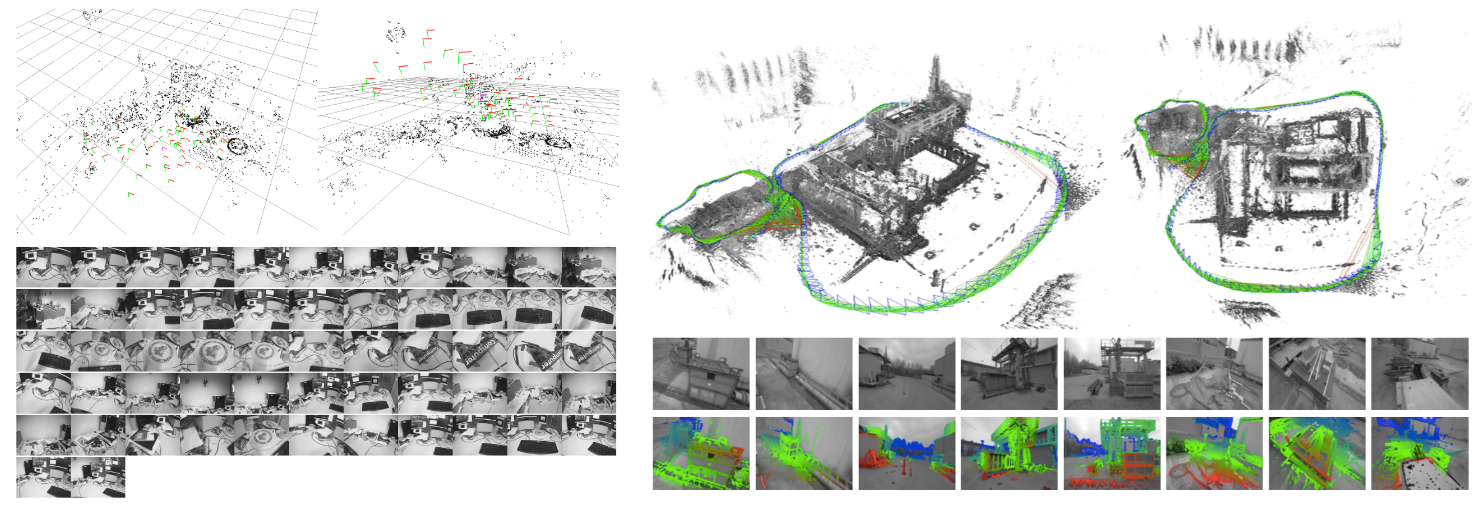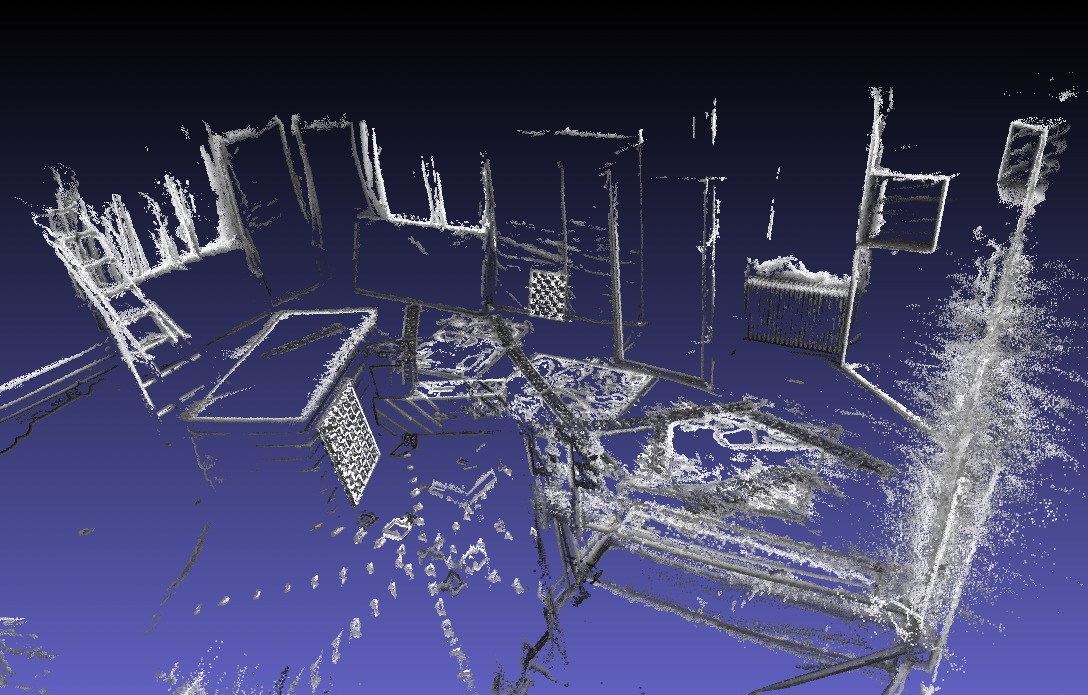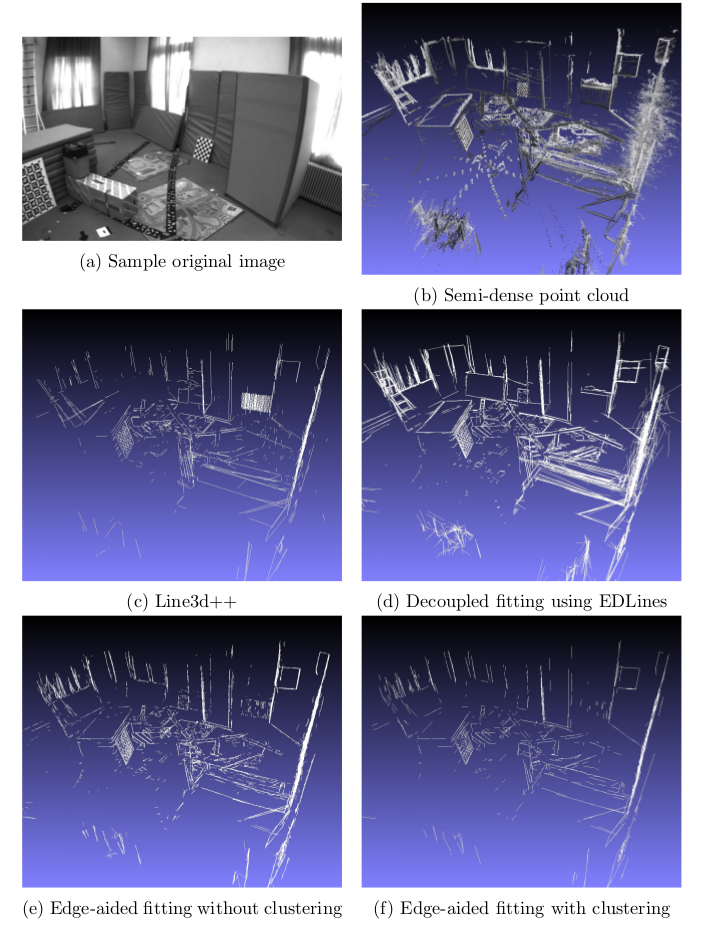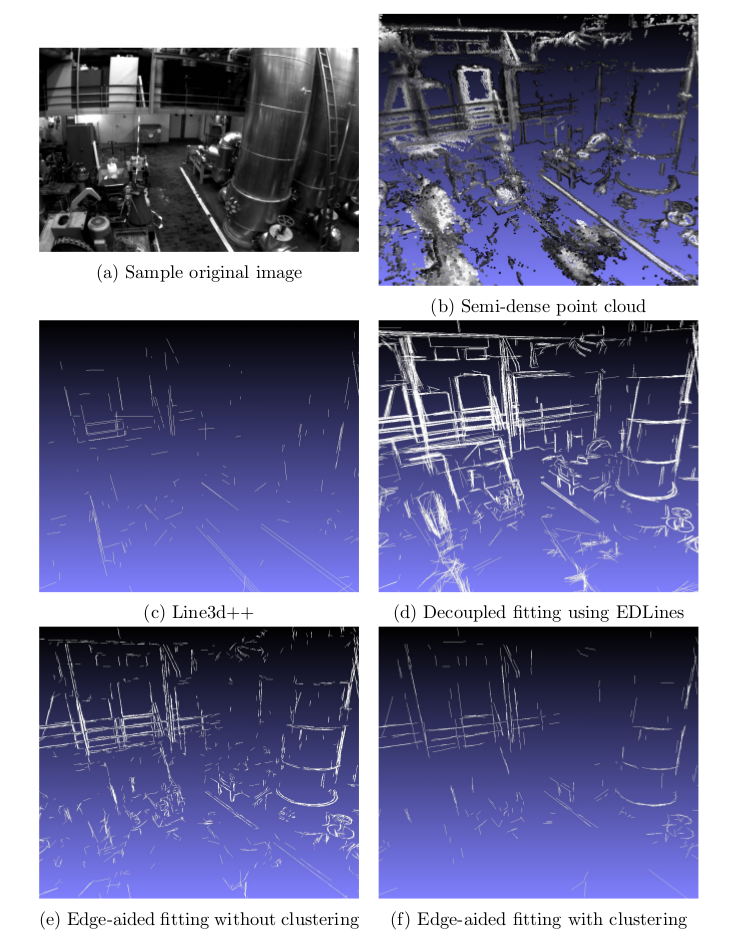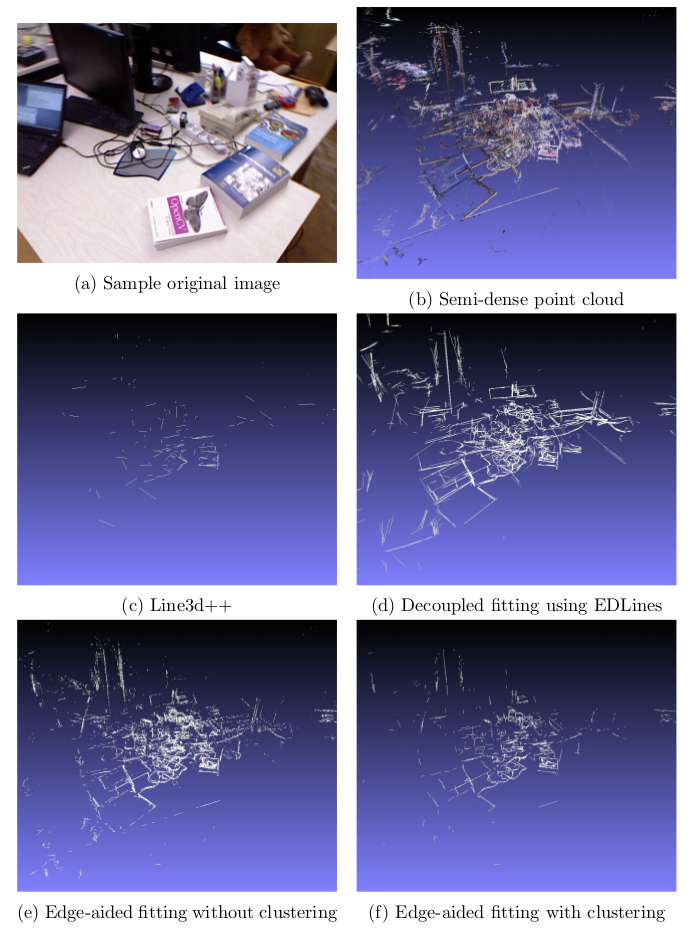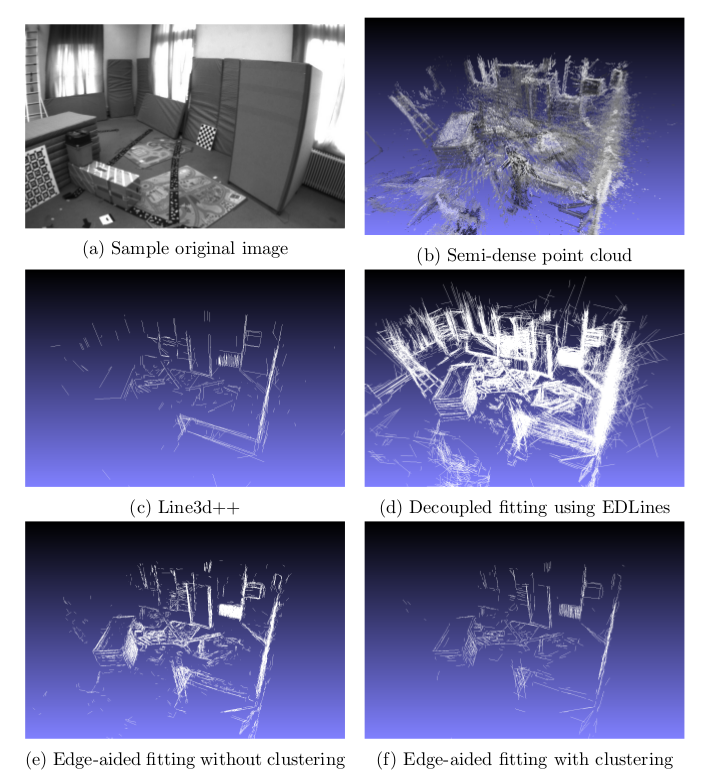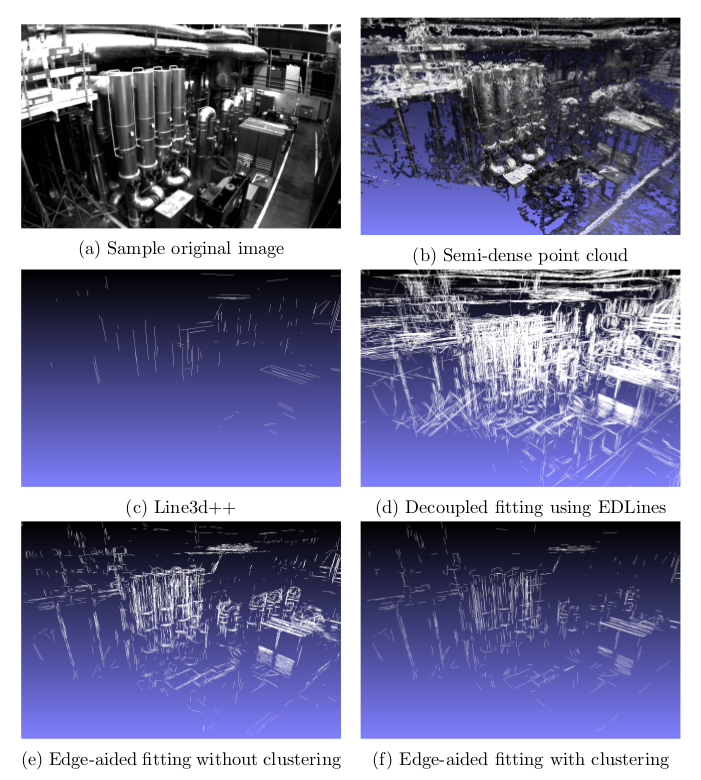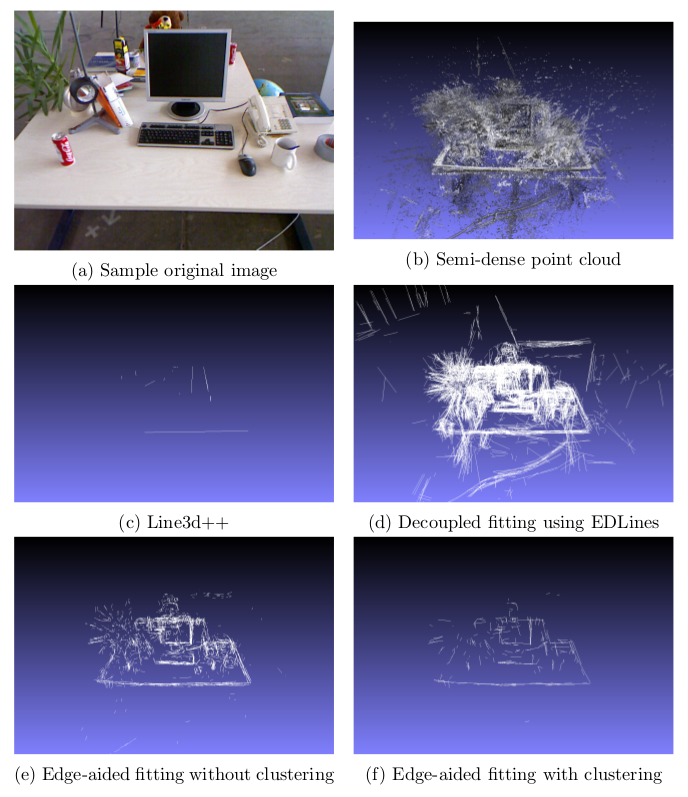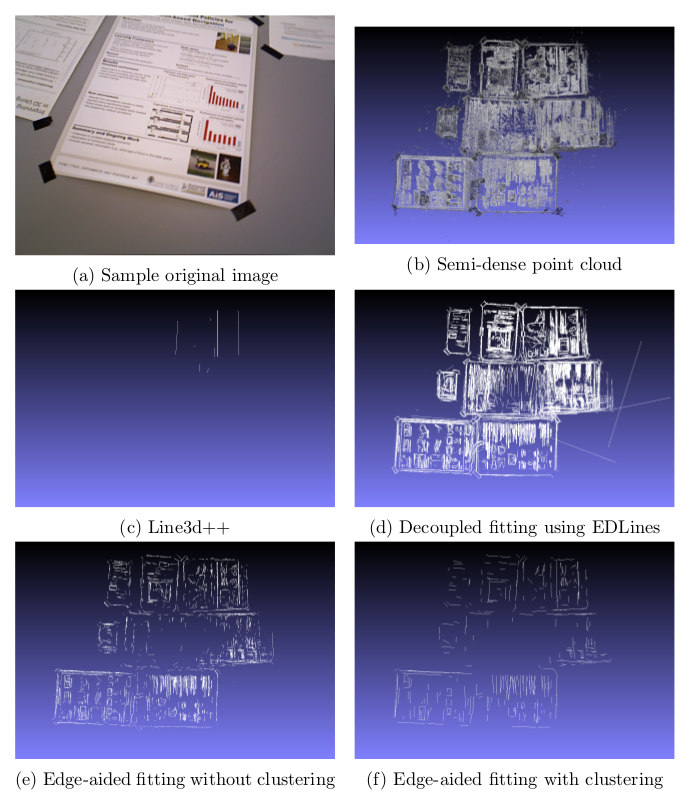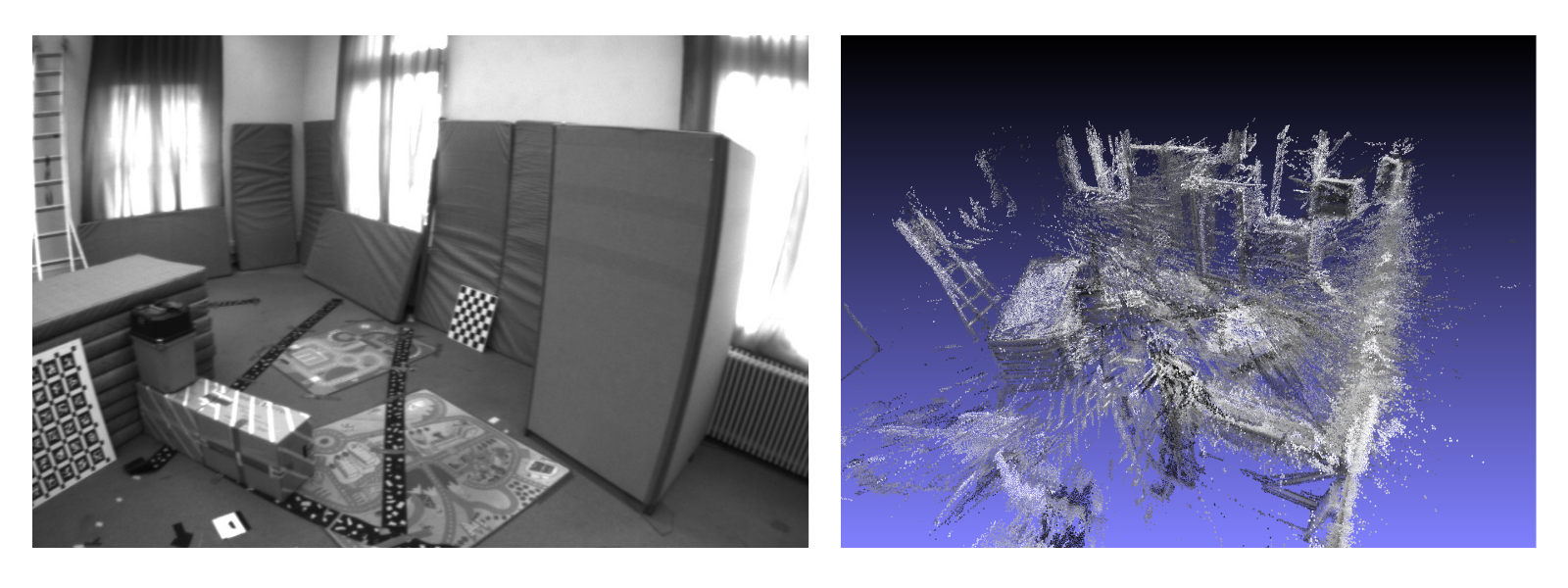
Semi-dense Point Cloud
Semi-dense SLAM system takes a stream of input images (left), and outputs the camera poses and semi-dense point cloud (right).
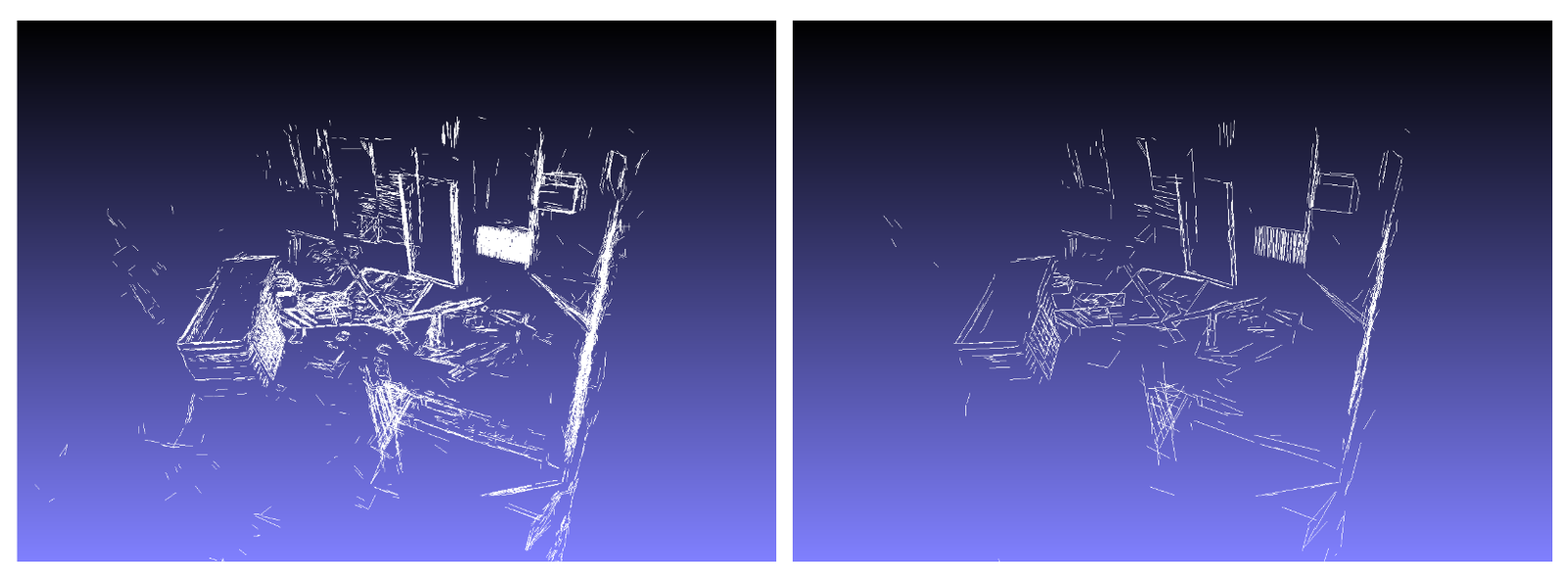
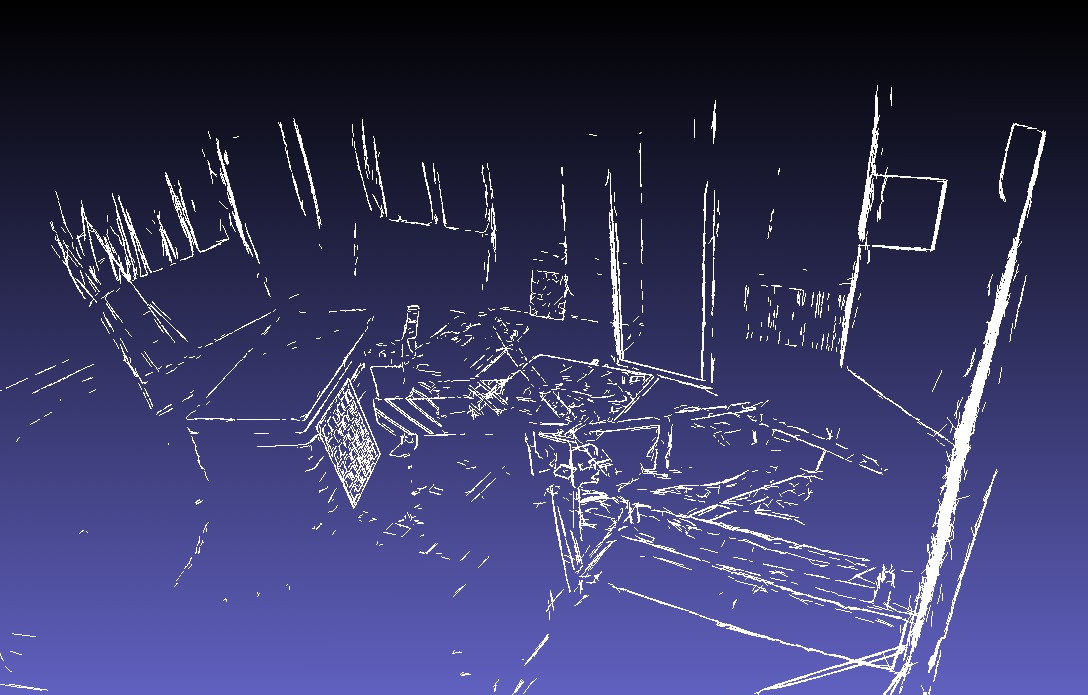
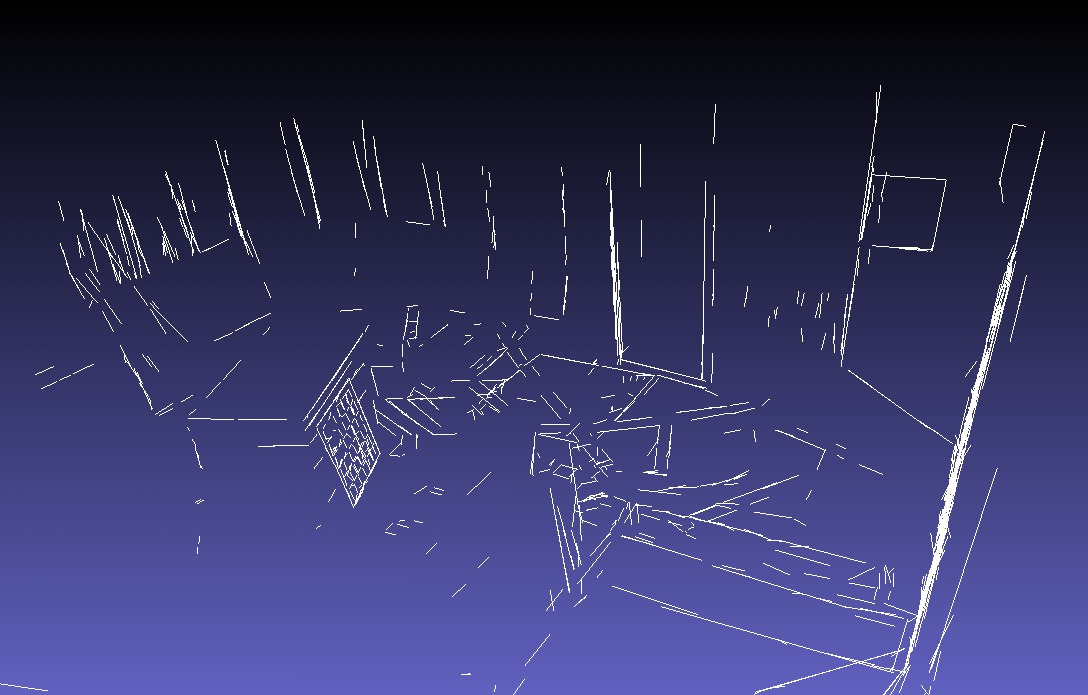
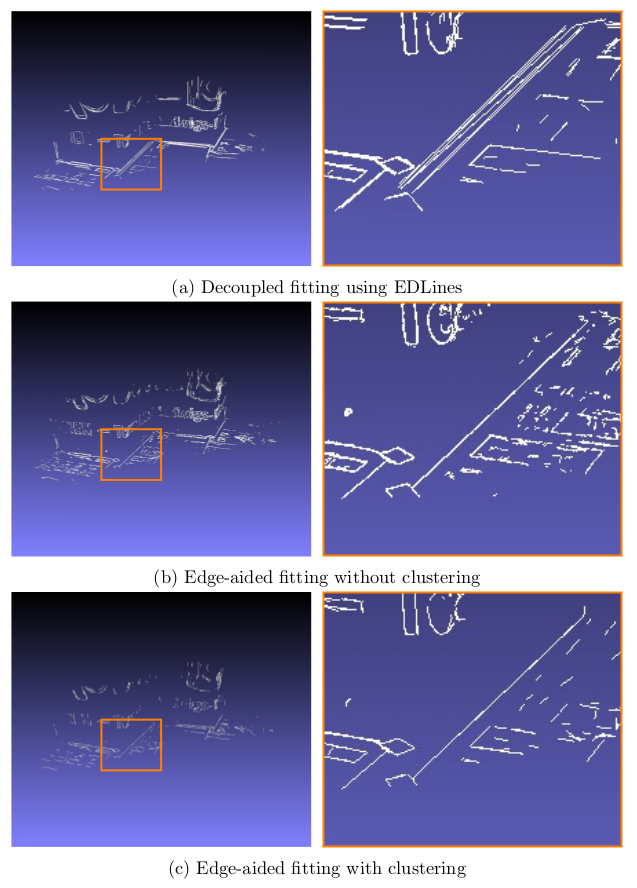
Extracted 3D Line Segments
From the output of semi-dense SLAM, our method extracts 3D line segments (left). The line segments are then clustered incrementally (right).
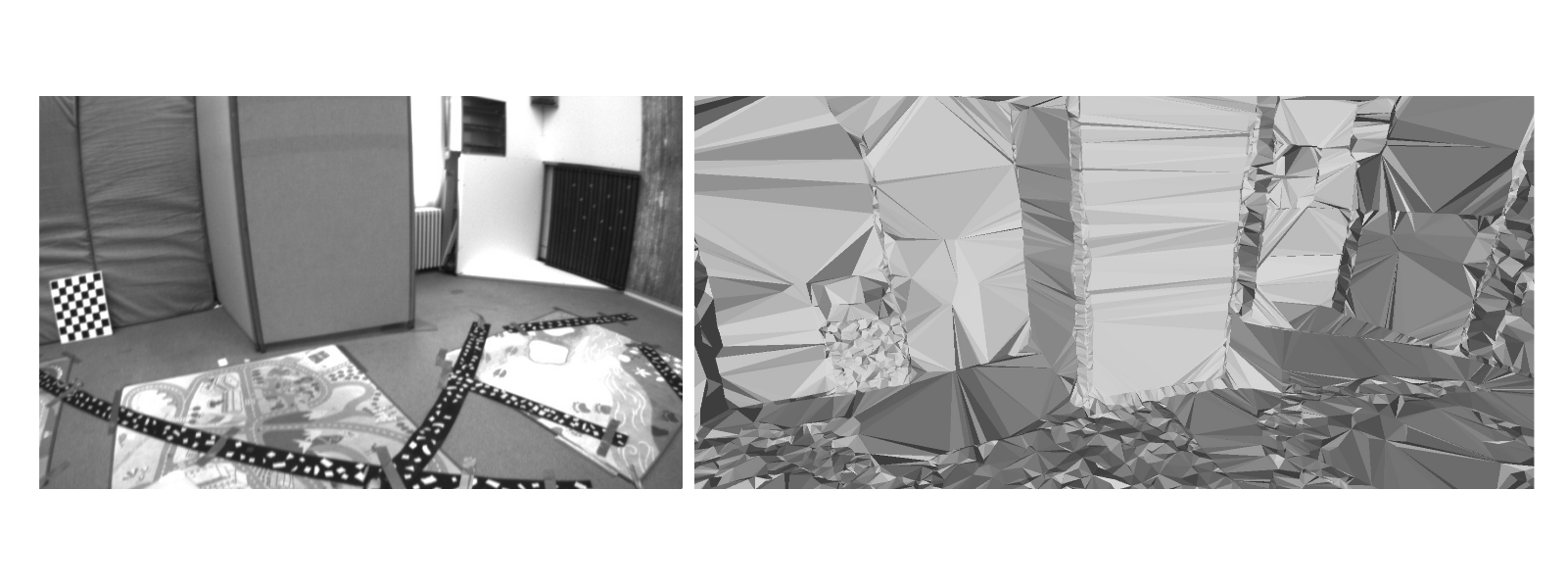
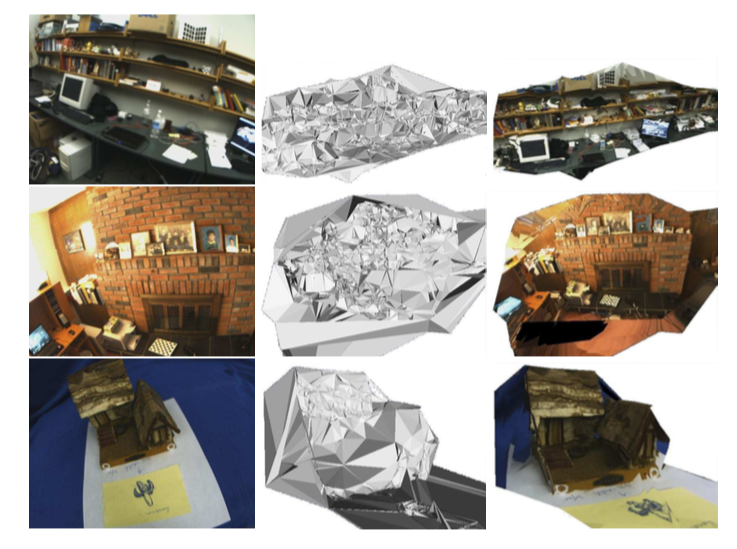
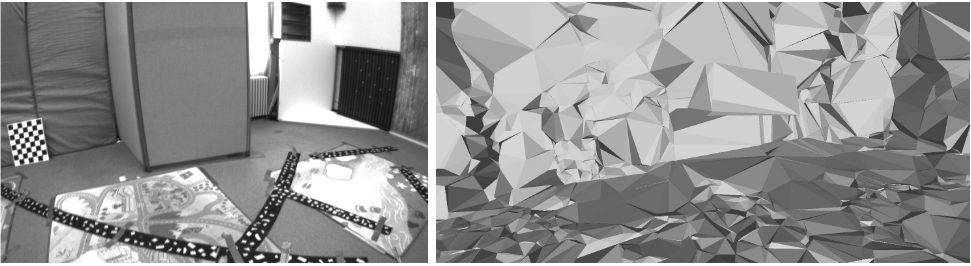
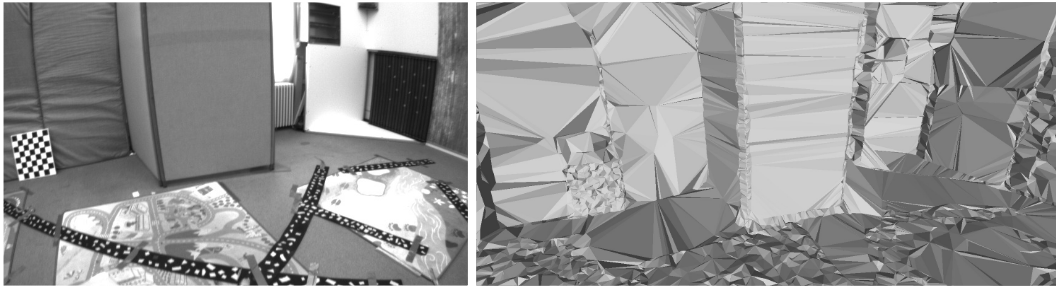
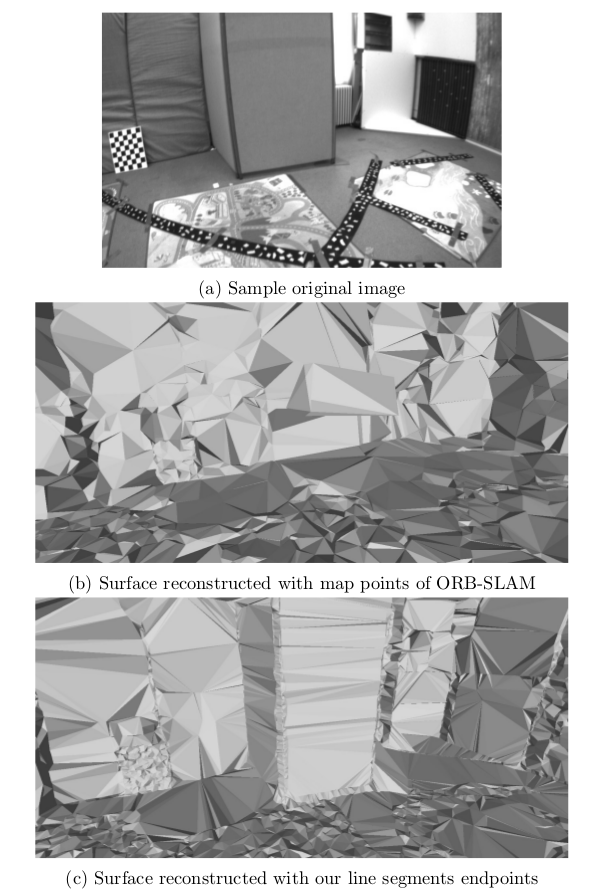
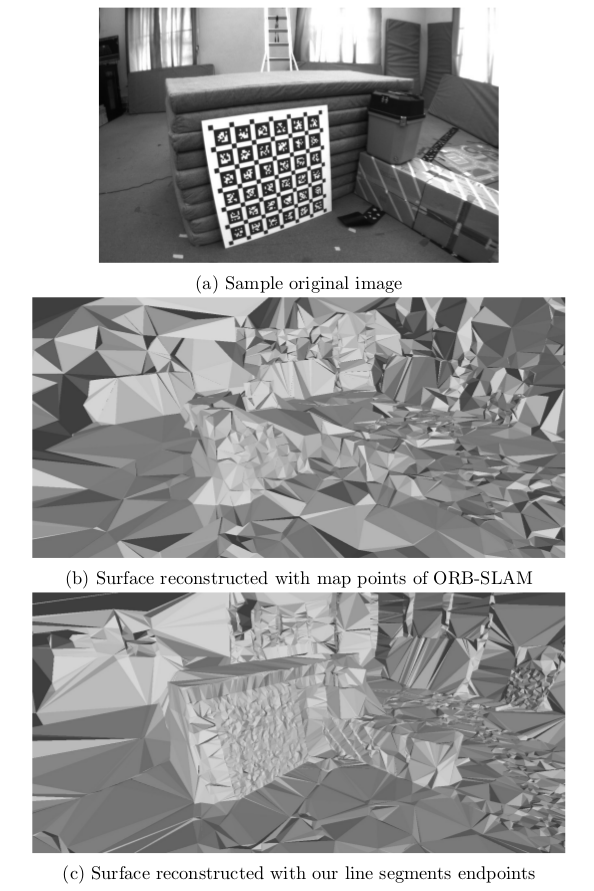
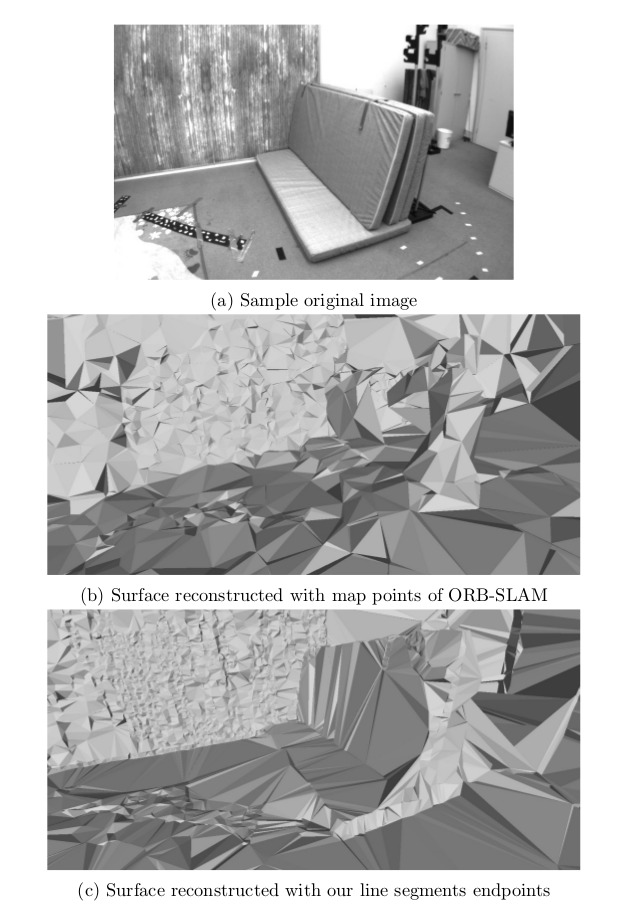
Reconstructed Surface
We can reconstruct high quality surfaces using the extracted line segments. Sample image (left); reconstructed surface from a similar viewpoint (right).