AlphaGo
computer go
the race to build a superhuman go-bot is over: AlphaGo won. computer go research will continue mostly in the commercial world, as developers (e.g. Coulom and Crazystone) bring AlphaGo tech to market and, eventually, cell phones
brief history
2006: monte carlo tree search
pre-AlphaGo: top pros beat top programs + 3 stone handicap
2015 AlphaGo - Fan Hui 2p 5-0 (formal) 3-2 (blitz)
2016 AlphaGo - Lee Sedol korea 9p 4-1
2017 AlphaGo - Ke Jie (world number 1) china 9p 3-0
2017 AlphaGo retires
computer olympiad
since 1989, computer olympiad has been a main venue for computer-computer board game competition. UAlberta groups have competed in chess, checkers, othello, go, hex, amazons and other games
2006 Turin 19x19 gold Gnu Go 9x9 gold Crazystone
2009 9x9 gold Fuego (UAlberta)
2008 to present, 11x11 hex gold MoHex (UAlberta)
neural nets and image classification
a neural net is a machine-constructed function. you can learn more about neural nets (and convolutional neural nets, the kind used in AlphaGo) on chris olah's blog
supervised learning is learning from (usually human-supplied) training data
what are these? how did recognize them? (hint: not by image classification)
image classification is the process of learning how to recognize pixel images of things (e.g. kittens)
research in image classification works like this
humans gather large collections of human-labelled images
they then design an algorithm that distinguishes among the different kinds of images (e.g. species of birds)
they train their algorithm, say a neural net, by taking say 90% of the images
they use the remaining 10% of the images to test the accuracy of their algorithm
2012 breakthrough krizhevsky sutskever hinton: imagenet classification with dcnns explained
AlphaGo evolution
2010 Deepmind, an AI company, founded by Demis Hassabis (CEO) and 2 others.
2013 David Silver full-time head of reinforcement learning (worked from startup as consultant)
2014 Deepmind bought by Google, reportedly for over $500 million
can we use supervised learning and dcnns (deep cnns) to predict expert go moves ?
yes, Deepmind and independently U Edinburgh create go move-policy net
2015 feb training dcnns to play go storkey clark
2014 dec move evaluation in go using dcnns maddison huang sutskever silver
2015 oct secret match AlphaGo-Fan Hui 5-0
2016 jan nature paper
2016 mar AlphaGo-Lee Sedol 4-1
2017 jan-feb 60 anonymous AlphaGo Master online games
2017 mar AlphaGo-Ke Jie 3-0
2017 oct AlphaGo Zero nature paper
2017 dec AlphaZero self-learns Go, chess, shogi (Japanese chess)
2017-12-06 AZ-Stockfish 28-72-0 but did Stockfish have same resources as AZ ?
deepmind AlphaGo resources
AG teach with AG est. B winrate after 10 000 000 simulations
AlphaGo - Fan Hui 5-0 (and 3-2)
AlphaGo ! (nature paper)
AlphaGo - Lee Sedol 4-1
Fan Hui match commentary postmatch analysis ecg2016 Fan Hui talk
exercise: use AG-teach (above) to analyze AG-LS game 1 (above, all AG games)
match 5-Garlock-Redmond 9p AGA-Jackson-KimMyungwan 9p gogameguru
game 1, move 7
LS tries to throw off AG, backfires
AG flexible, solid
game 2, move 37
cigarette break, shoulder hit
AG beyond human
game 3: AG move 14 unusual, LS reply over-agressive
AG winrate .59 (move 28) .62 (move 32) .72 (move 48) .74 (move 54)
AG has no problem with ko.
LS 77 wild, AG winrate .84 (move 84)
LS resigns after move 176
AG superhuman, does whatever works best
game 4, AG builds big moyo
LS miracle move 78 (he saw that all other moves lose)
AG did not expect this move, in trouble by move 85
LS in byoyomi by move 103 but clearly winning: can he hang on? yes!
LS amazing, AG human
game 5, LS in trouble by move 80
AG too strong
2016 nov Deep Zen - Cho Chikun 1-2
deep zen go Cho Chikun (#1 1979-87 #≤10 -99, still active)
game 1 CC-DZ 1-0 aga michael redmond + antti tormanen myungwan kim
game 2 DZ-CC 1-0 aga redmond + tormanen myungwan kim
game 3 CC-DZ 1-0 sgf redmond + at aj + myungwan kim
all games redmond at + redmond
deep zen
used a single $15K computer (requires 1-2 Kw power)
after game 1, multiplied available-time-per-move by 1.8
costs about $400 CAD
in games where winner often has narrow line of play, eg. sequence with unique winning move(s), randomized simulation often has wrong result
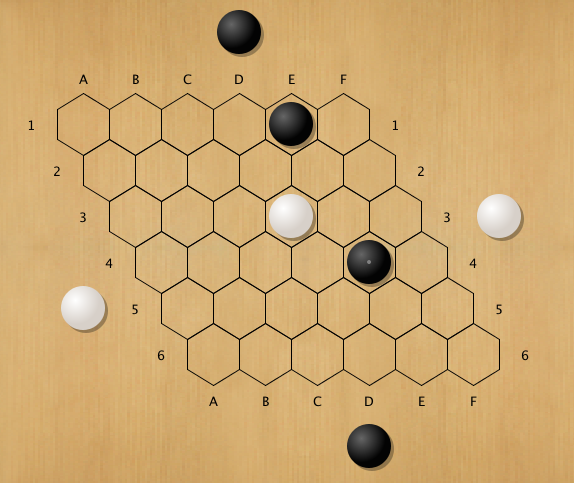
eg. above hex position, white to play, who wins ?
mohex, rave, 17500 simulations in tree, win rate .53, move d5
d5 loses, all white moves lose: black wins
among commercial go programs, zen has strong playouts (simulations)
but zen's playouts missed Cho Chikun's best defensive sequences
move 137 zen estimates this final position win rate .64 (mcts below .55 usually loses)
cell size shows prob. player owns cell at end
notice: zen estimates white has large group middle right
but simulations are too optimistic: zen win rate drops
white 156, 158 gain little: Cho Chikun guesses computer in trouble
after 164, white win rate .48
black 167: cut
white 168 zen operator Hideki Kato places black stones captured by white on board: resign
after 167, middle right white group dead, black wins easily
storkey-clark dcnn correctly-predicted next-moves
1 2 3 4 5 6 - - 9
- 11 12 - 14 15 16 - - 19
20 21 - 23 24 - 26 27 - -
30 31 - 33 34 35 36 - 38 -
40 41 42 - - 45 46 47 - 49
- 51 52 - 54 - - 57 - -
60 61 - 63 64 65 66 - - 69
70 71 - 73 74 75 76 - - -
- 81 82 83 - - - - - -
- - - - - - - - - -
- 101 102 - 104 - ...
nature paper: details
go is a game of perfect information, so solving is easy: traverse the game tree
problem: depth ~ 150 breadth ~ 250 search space ~ 10**360
number atoms in observable universe ~ 10**80
idea: reduce search space truncate tree at depth d, for subtree s, replace true v*(s) with v’(s)
idea: reduce breadth sample actions from policy p(a|s) that is prob. dist. over moves a from s
this sampling is what mcts does
big improvement in image classification using dcnn: use many layers of neurons, each arranged in overlapping tiles, to represent image
AlphaGo: use neural nets to evaluate positions value net
AlphaGo: use neural nets to estimate p(a|s) policy net
AlphaGo network training pipeline
start with 29 400 000 positions from 160 000 KGS games, train supervised learning policy net
result: strong policy net
also train a fast (weaker) policy net
train a value net
combine fast policy net and value net with mcts
{kind=link}
input features for AG neural nets
cell: player opponent empty
liberties
capture size
self-atari size
liberties after move
ladder capture
ladder escape
legal and does not fill own eye
policy nets (deep, shallow) via supervised learning
goal here: using human data and sl, create a policy net
for arbitrary state s and all possible actions a, deep convolution neural net that estimates function f = prob(a|s)
input: board position s
output: from s, for each empty cell a, probability (from the human data) that human selects action a
how dcnn accuracy is measured
fraction of human record data is withheld from training, used for testing
human data: 30 000 000 game positions from 160 000 KGS games
improvement: when input is board position + above features, function is more accurate
SL policy net accuracy:
.557 (board input)
.57 (board + features input)
| net | response time (10-6 s) | response accuracy |
| deep | 3 000 | .57 |
| shallow | 2 | .24 |
strengthen policy net via reinforcement learning
observation: a move that clearly leads to a loss is not likely to be played
so adding information about whether move leads to loss should make dcnn more accurate
improvement: starting from SL policy net, train a new neural net using reinforcement learning
for each move, self-play game to end, find result
move that leads to win gets reward 1
move that leads to loss gets reward -1
RL dcnn is similar architecture to SL dcnn (1 extra final layer)
weights of RL dcnn initialized to final weights of SL dcnn
reinforcement learning then trains RL dcnn to find final weights
RL policy net v SL policy net winrate .8
from RL policy net to RL value net
policy net estimates probability of making a move
so ranks children, but cannot rank non-siblings
for tree search (eg. minimax, mcts, …) need to be able to compare non-siblings
need, for each node, an estimate of value: what is the probability that a given move wins ?
for arbitrary state s, deep convolution neural net estimates v(s) = prob(s is winning position)
input: board position s
problem: using 30 000 000 game positions from only 160 000 games leads to overfitting
value net learns to mimic move sequences in 160 000 games, but plays poorly in other games
solution: use 30 000 000 game positions from 30 000 000 self-play data-set games
RL value net will be used at leaf nodes of tree search
MCTS will also be used at leaf nodes of tree search
one RL value net call comparable in accuracy to about t MCTS simulations using the fast RL policy net, but requires 15 000 times less computation time
AlphaGo search: integrate policy / value nets into MCTS
each edge (s,a) stores action value Q(s,a) from policy net, visit count N(s,a), prior probability P(s,a)
bonus u(s,a) proportional to P(s,a) / (1 + N(s,a))
use argmax ( Q(s_t,a) + u(s_t,a) ) for child selection
at leaf, expand if number of visits exceeds a threshold
at leaf, evaluate using simulation and using value net (mixed ratio .5 .5 is best)
after simulation, backup as usual, update N(s,a), update Q(s,a)
when time is up, pick root child with most visits as move
surprise
SL policy net works better in MCTS than stronger RL policy net, presumably because humans select a diverse beam of promising moves to explore, whereas RL optimizes for single best move
RL value net (derived from RL policy net) works better in AlphaGo than similar value net derived from SL policy net
evaluating policy / value nets is slow, so
use asynchronous multi-threaded search
use CPUs for simulation
use GPUs for policy / value net calls
AlphaGo specs
single-machine: 40 search threads, 48 CPUs, 8 GPUs
distributed: 40 search threads, 1202 CPUs, 176 GPUs
simulations
like RAVE, but more general (used also in Crazystone and Erica)
each move (and est. win prob) in tree is cached
simulations use these cache moves/probs
RAVE uses these probs only for children of each node on path to root
response ( 1 pattern )
save atari ( 1 )
neighbour to previous move ( 8 )
nakade (inside move) ( 8192 )
response pattern (12-point diamond around prev move) ( 32207 )
non-response pattern (8-points around cell) ( 69338 )
if x group has no outside liberties , where should x/o play ? x x x x x x - - - x x x x x x
tree policy features
all simulation policy features plus …
self-atari ( 1 ) moves allows stone to be captured
last move distance ( 34 ) manhattan distance to previous 2 moves
non-response pattern ( 32207 )
discussion
in Fan Hui match, AlphaGo looked at thousands times fewer / second positions than DeepBlue-Kasparov but …
picked positions more wisely, using policy net and mcts
evaluated positions more accurately, using value net and sims
DeepBlue used handcrafted eval function
AlphaGo used neural nets trained using general-purpose supervised/reinforcement learning methods
AlphaGo trained with no-suicide Tromp-Taylor rules (close to Chinese rules), komi 7.5
changing komi or rule-set would require retraining all its neural nets
AlphaGo uses no RAVE, no progressive widening, no dynamic komi, no opening book
AlphaGo time management policy found by ad hoc selfplay machine learning
AlphaGo ponders (thinks during own and opponent's clock time)
in Lee Sedol match
AlphaGo time per move close to constant
LS often behind on time (compared to AG)
AG pondering exaggerated this effect, putting LS under more time pressure
9-dan pros like LS used to playing with little time